


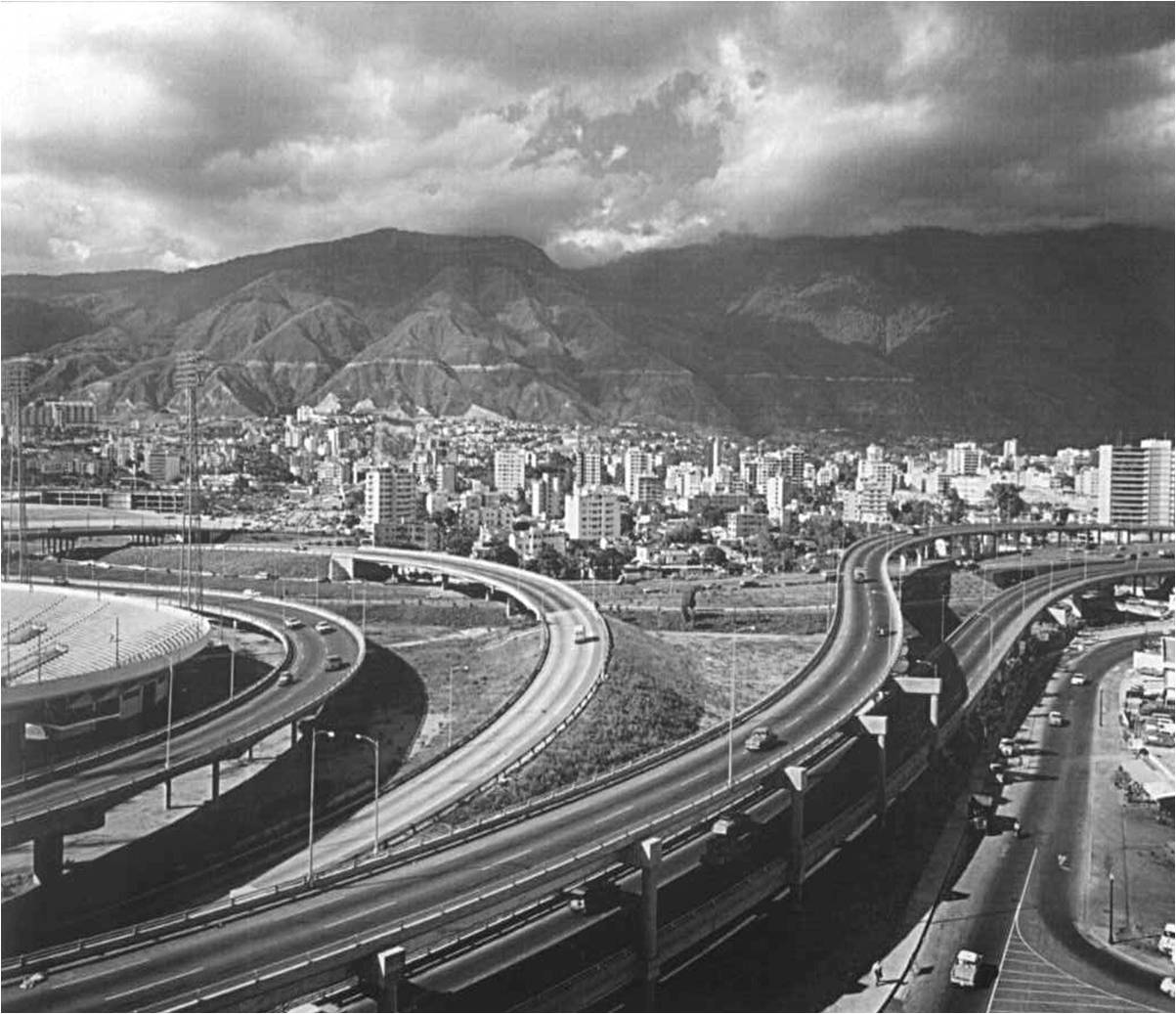
El concepto de conducción autónoma no es nuevo, a finales de 1950 se construyó una autopista autónoma que prometía revolucionar el sector
.
Finales de 1950, llegas a una autopista, presionas el botón que pone Electronic drive. El coche te indica que selecciones el carril y que lo dejes trabajar, que tu puedes leer, escuchar música, ponerte al día con el trabajo convirtiendo tu coche en una improvisada oficina… ¿Es 1950 o 2050?
Esta opción se planteó en un tramo de pruebas en Nebraska de 120 metros. Tras dos años y medio de trabajo, un grupo de periodistas tuvo acceso a las pruebas y experimentaron cómo sería la autopista del futuro, un avance que en la década de los 50 parecía que podía llegar en pocos años al mercado pero que se quedó como un fallido intento de adelantar el futuro. ¿Cómo funcionaba?
El sistema fue creado por Vladimir Zworykin, un reconocido ingeniero de RCA, conocido por su trabajo en televisión.
Los coches estaban equipados con sensores ubicados en los paragolpes delanteros que detectaban un cable eléctrico integrado en la carretera. El cable se encarga de transportar la información relacionada con los obstáculos que existan delante del coche como otro vehículo detenido, con esta información el coche podría detenerse o bien cambiar de carril en caso de que no exista otro vehículo en ese carril. Para avisar al conductor se instalaba en estos coches un receptor especial que bloqueaba la radio y emitía una señal con la alerta.
Estos coches tenían además una modificación muy importante: no tenían ni pedales ni volante y tan solo existía una pequeña palanca de control y un freno de emergencia. El tablero de instrumentos se encargaba de mostrar la velocidad del vehículo y la distancia con respecto al coche que circula por delante.
La idea era buena, la tecnología era demasiado primitiva.
Las pruebas tuvieron relativo éxito, los periodistas relataban que circulaban a una distancia de unos 50 metros entre vehículos y en caso de frenada de emergencia la distancia no superaba los 5 metros. No se comunicó la velocidad alcanzada, pero lo más probable es que no superasen los 50 km/h. Esta tecnología de autopista autónoma tenía un problema: no era autónoma. Si tu coche se detenía o tenías un accidente, eras el responsable de avisar que estabas detenido, en caso de no hacerlo, el coche que circula por detrás no lo sabe y no puede evitarlo. El problema era la comunicación entre coches, una problemática similar a la que existe en estos momentos y que es una de las más complicadas de solucionar.
Fuente: Hipertextual

